Cerebros de la UMA
‘Rolling Fingers’, la mano robótica que desplaza objetos con un único agarre
Este prototipo ideado por investigadores de la UMA está dotado de capacidad de desplazamiento mientras se agarra un objeto gracias a sus dedos, lo que permite hacer con una mano tareas que habitualmente necesitan dos
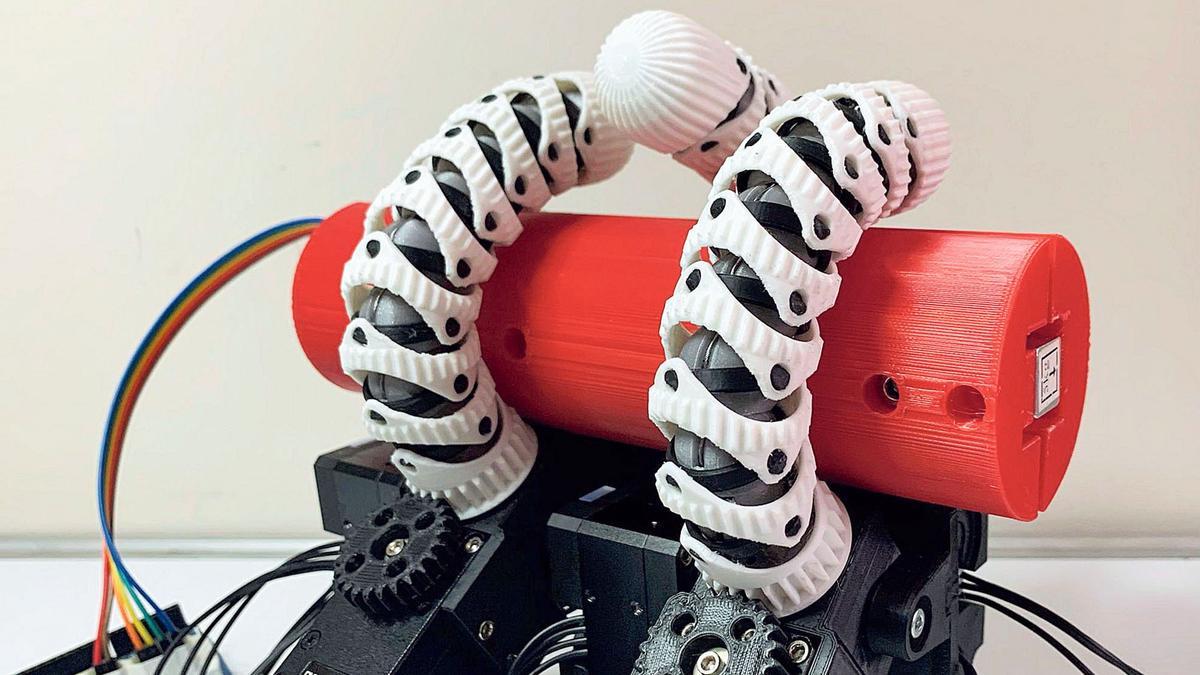
‘Rolling Fingers’, el prototipo de mano robótica diseñado por investigadores de la UMA. / L. O.
Alicia González
‘Rolling Fingers’, diseñada por investigadores de la UMA, es la primera mano robótica que permite desplazar objetos con un único agarre. El prototipo consta de unos dedos completamente articulados y adaptables que, además, cuentan con una piel que rota de manera axial, lo que permite realizar movimientos sin necesidad de emplear dos brazos, cosa que, hasta ahora, había resultado imprescindible para cualquier robot.
«Lo que hemos conseguido es algo que han intentado también muchos otros investigadores, que es dotar de desplazamiento mientras que se está agarrando, gracias a que los dedos, además de doblarse, tienen una piel que rota a través de su eje», explica Jesús Gómez, autor principal del proyecto y profesor de Telerobótica en la Universidad de Málaga, siendo esta la asignatura que más le define.
Del inglés ‘roll up’, obtiene su nombre ‘Rolling Fingers’, cuya principal ventaja, según el investigador, es precisamente poder emplear una única mano para realizar tareas que, por lo habitual, requieren dos. La capacidad de poder manipular de forma segura componentes no rígidos es un gran potencial añadido.
Por ejemplo, si la mano robótica agarra un objeto cilíndrico, como puede ser el brazo de una persona, esta puede reposicionar el punto de agarre para que la persona esté más cómoda y realizar operaciones como remangar la ropa. La rotación de los dedos a distinta velocidad permite desplazar la mano sobre el brazo sin soltarlo, sin necesidad de aflojar la mano y los dedos.
«Los beneficios principales esperamos obtenerlos en ambientes domésticos y asistenciales», apunta Gómez, quien espera que la mano pueda usarse con humanos a medio e incluso a corto plazo.
De este modo, según explica el ingeniero, una de sus principales utilidades podría ser, por ejemplo, la toma de constantes vitales de una persona o la colocación de inyecciones, en el caso de que se colocara un dispositivo específico para ello al robot.
Además, los investigadores que han desarrollado el prototipo han solicitado construir un demostrador para explorar sus posibles aplicaciones industriales. Una de ellas sería la manipulación de elementos estructurales y objetos alargados, como vigas y tuberías, de modo que una sola mano agarre la pieza, la reposicione y realice diversas maniobras. Es decir, hacer ensamblamientos que, usualmente, requieren dos o más manipuladores o brazos que trabajen de manera colaborativa. Esto supone un ahorro en cuanto a coste y en cuanto a tiempo de operación. «Se trata de un proyecto no ya de investigación, sino de transferencia. Queremos ver si esto que hemos desarrollado puede funcionar bien en aplicaciones industriales, para eso antes hay que comprobarlo en un demostrador. Si eso funciona, la adopción industrial sería inmediata», añade el experto en telerobótica.
«Si conseguimos que una sola mano haga una tarea, estamos ampliando las posibilidades de un robot más sencillo, más económico»
En ingeniería, y sobre todo en robótica, el coste es muy importante, por lo que crear un prototipo con una sola mano supone una gran disminución del precio de producción y difusión, según relata Gómez. «Si necesitamos colocar dos brazos robot para realizar algo, estamos duplicando el coste de ese robot. Si conseguimos que una sola mano robótica haga una tarea, estamos ampliando las posibilidades de un robot más sencillo, más económico y que puede difundirse de una manera más fácil».
La mano robótica ha tardado en desarrollarse aproximadamente un año, desde que se decidió empezar a realizar el diseño; aunque, tal como afirma el investigador, «su concepción fue mucho antes».
El prototipo se ha desarrollado dentro de la línea I+D+i de la UMA ‘Robótica para interacción física con humanos’, con la colaboración del ‘Mechanical Engineering Department de la ‘University College London’, en Reino Unido. Es fruto de los esfuerzos aunados de cuatro investigadores en total, tres de la Escuela de Ingenierías Industriales de la UMA y uno del laboratorio de la escuela en Londres.

Dos, tres o cuatro dedos
Ahora bien, ¿qué partes componen una mano robótica? Según Gómez, esta se puede hacer, dependiendo de la aplicación, con dos, tres o cuatro dedos, a veces incluso más. Cada dedo se compone de una estructura interna que se adapta a la forma del objeto que agarra y cuenta con una piel externa, articulada, que es la que produce el efecto de rotación.
En un principio, el prototipo contaba con tres dedos, pero se ya se le ha agregado uno más «para manipular los brazos de una persona, al añadir más dedos, la presión que estos ejercen se reparte mejor», detalla el ingeniero. «Con cuatro dedos estamos explorando e implementando la función de remangar, en inglés ‘roll up’, para poder, por ejemplo, tener acceso a las constantes vitales del brazo».
Jesús Gómez tenía claro ya desde muy joven, con apenas 13 años, que quería un futuro dedicándose a la robótica, ámbito en el que se desarrollan los avances tecnológicos de muchos productos de uso diario y otros especializados en áreas más complejas. «De pequeño quería construir robots e ir a Estados Unidos a enseñarlos. En 1996 lo conseguí, así que la verdad que ese es un sueño que he llegado a cumplir», confiesa el ingeniero.
Su trabajo de investigación se ve reflejado en ‘Rolling Fingers’, proyecto que supone un gran avance en este ámbito y cuyo futuro es, cuanto menos, prometedor.
- El PSOE pide la expropiación de la Hacienda San Javier para "devolver a Churriana una joya arquitectónica del XIX
- Cuatro colegios de Málaga, entre los 100 mejores de España
- El Gobierno central se niega a quitar el peaje en la Costa del Sol
- El túnel de la Alcazaba recuperará el tráfico en ambos sentidos durante un mes
- Málaga será la única provincia del sur peninsular con autopistas de peaje
- Hoy entra en servicio la línea 20 Exprés Alameda -Ciudad Jardín, con menos paradas
- La baja natalidad obliga a suprimir clases en los colegios de Málaga
- Denso Ten factura más de 190 millones en Málaga y firma el tercer mejor año de su historia